
3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles
The 3 DOF Hover experiment provides an economical test bed to understand and develop control laws for flight dynamics and control of vehicles with vertical lift off.

Product Details
The 3 DOF Hover consists of a planar round frame with four propellers. The frame is mounted on a three degrees of freedom pivot joint that enables the body to rotate about the roll, pitch and yaw axes. The propellers are driven by four DC motors that are mounted at the vertices of the frame. The propellers generate a lift force that can be used to directly control the pitch and roll angles. Two of the propellers are counter-rotating, so that the total torque in the system is balanced when the thrust of the four propellers is approximately equal.
- Three degrees of freedom (3 DOF) – body rotates about pitch and yaw axes
- Precise, stiff and heavy-duty machined components
- Propellers driven by high-quality Pittman DC motors
- High-resolution optical encoders for precise position measurements
- Slip ring allows infinite motion about the yaw axis
| Device mass | 3.46 kg |
| Device height (ground to top of base) | 45 cm |
| Helicopter body mass | 1.39 kg |
| Helicopter body length | 48 cm |
| Base dimensions (W x L) | 17.5 cm x 17.5 cm |
| Encoder resolution (in quadrature) | 8192 counts/rev |
| Pitch angle range | 75 (± 37.5 deg) |
| Yaw angle range | 360 deg |
| Motor / propeller force-thrust constant | 0.119 N/V |
| Motor / propeller torque thrust constant | 0.0036 N.m/V |
| Propeller diameter | 20.3 cm |
| Propeller pitch | 15.2 cm |
| Motor armature resistance | 0.83 Ω |
| Motor current-torque constant | 0.0182 N.m/A |
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser VoltPAQ-X4 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
Related Products
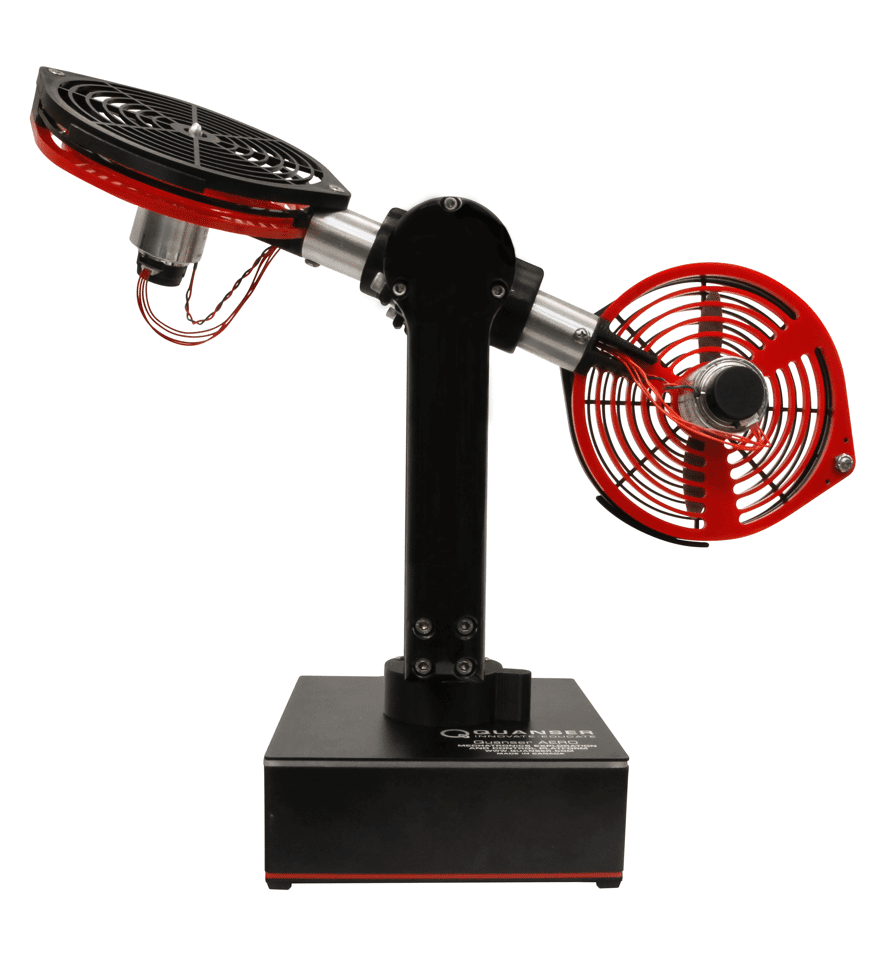
Quanser AERO
This product is no longer available.

3 DOF Helicopter
Advanced flight dynamics and aerospace control experiment
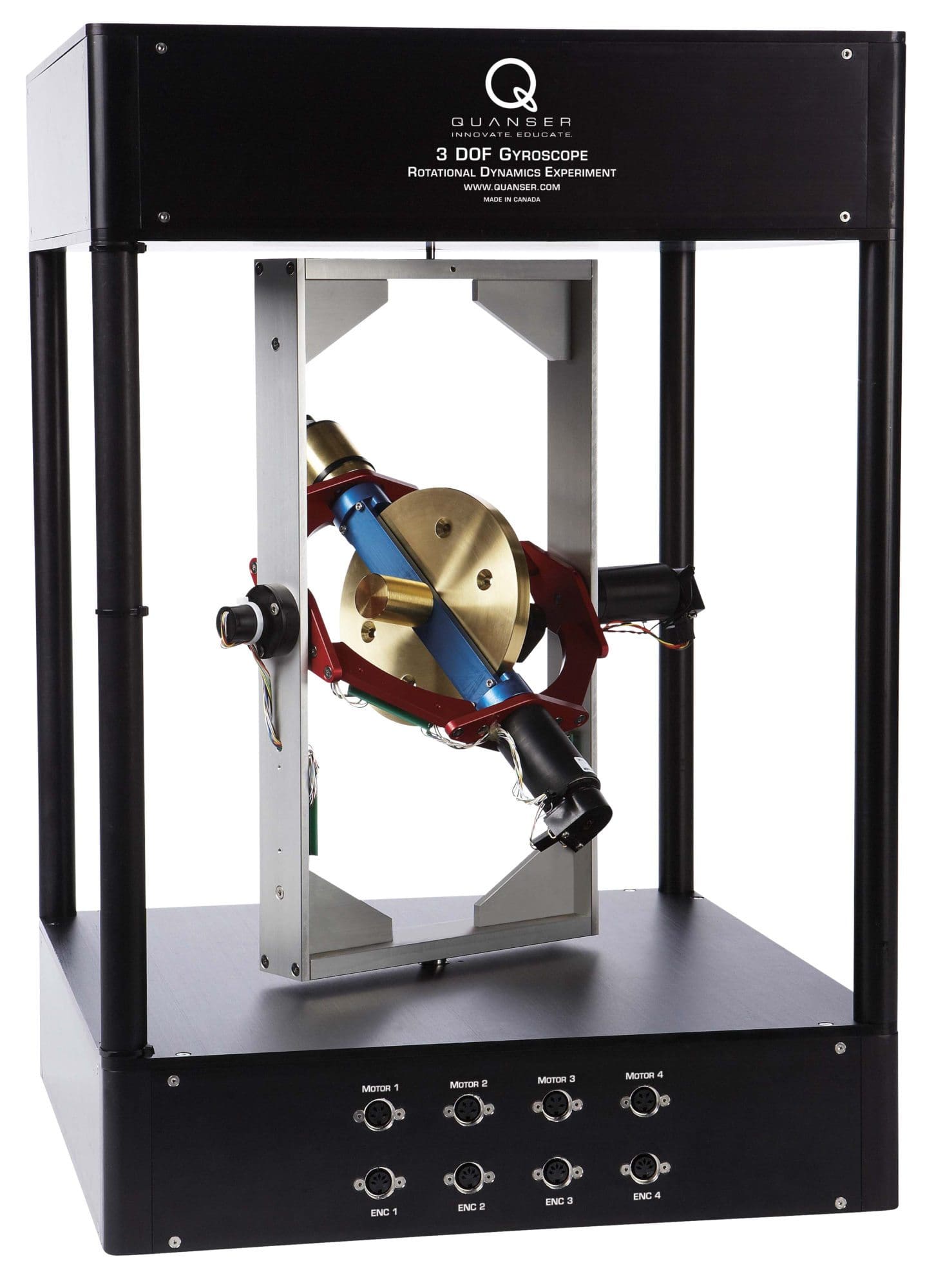
3 DOF Gyroscope
Advanced platform for aerospace modelling and control research

QDrone
This product is no longer available.
Autonomous Vehicles Research Studio
Jump-start Your Autonomous Vehicles Research
