
QBot 3
High-performance Autonomous Ground Robot for Indoor Labs
The Quanser QBot 3 is an innovative open-architecture autonomous ground robot, built on a 2-wheel mobile platform. Equipped with built-in sensors, a vision system, and accompanied by extensive courseware, the QBot 3 is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses. The courseware laboratory exercises are organized in a set of independent modules, allowing professors to select and adapt them easily for an existing course, or build a new course.

Gallery



Product Details
The Quanser QBot 3 is an innovative open-architecture autonomous ground robot, built on a 2-wheel mobile platform. Equipped with built-in sensors, a vision system, and accompanied by extensive courseware, the QBot 3 is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses. The courseware laboratory exercises are organized in a set of independent modules, allowing professors to select and adapt them easily for an existing course, or build a new course.
A reinforced landing platform and cargo plate also functions as an electromechanical prototyping platform for use in design projects. The open-architecture control structure allows users to add other off-the-shelf sensors and customize the QBot 3 for their research in areas such as vehicle navigation and control, autonomous vehicles control, machine learning, and computer vision, multi-agent heterogenous and swarm robotics, and more.
- Curriculum and lab exercises for robotics and mechatronics courses
- Deploy applications via Simulink, Python and/or ROS
- Support for off-the-shelf sensors and actuators using fully accessible 40-pin I/O header and Pi HATs
- Open-architecture design with fully documented system models and parameters provided
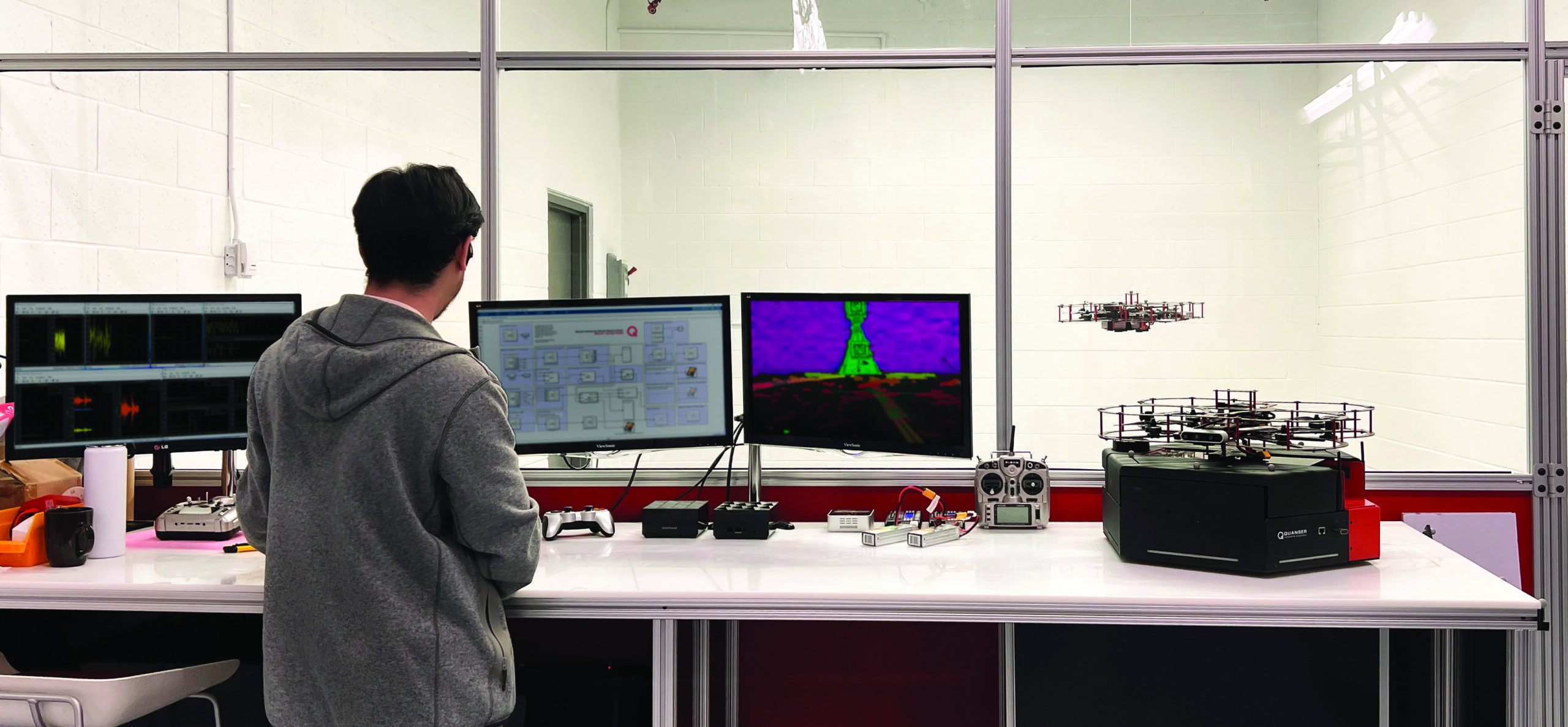
- Electromechanical prototyping platform and landing pad for use with UAVs
- Easy integration of additional elements of the Quanser Autonomous Vehicle Research Studio
- Wide range of sensors including bumpers, wheel-drop and cliff sensors, 3-axis gyroscope, Intel RealSense D415 RGBD camera
Platform |
2-wheeled Kobuki base from Yujin Robot |
QBot 3 diameter |
35 cm |
QBot 3 height |
16 cm |
Maximum linear speed |
0.7 m/s |
Available payload |
app. 4.5 kg |
Battery life |
Maximum 3 hours |
On-board computer |
Raspberry Pi 4B 4GB |
Camera resolution |
1080p @ 30Hz, 720p @ 30Hz, 480p @ 60Hz |
Depth resolution |
720p @ 30Hz, 480p @ 60Hz |
Depth range |
0.5 to 12 m |
LCD module |
32 characters (16 per line) |
On-board sensors |
3 digital bump sensors2 digital wheel drop sensors3 cliff sensors1 3-axis gyrosc0pe2 analog motor current sensors1 Z-axis angle measurement (heading)2 multicolor programmable LEDs
|
Additional I/O channels |
28 reconfigurable digital I/O channels, including2 SPI bus channels1 I2C serial bus channel2 PWM output channels1 UART serial port (interface 3.3 V serial device) |
Additional Connectivity |
2 USB 3.0 user ports4 USB 2.0 user ports1 MIPI DSI display port for touch screen1 gigabit Ethernet port1 MIPI CSI camera port40-pin I/O header |
- Forward and inverse differential kinematics
- Dead reckoning and odometric localization
- Path planning and obstacle avoidance
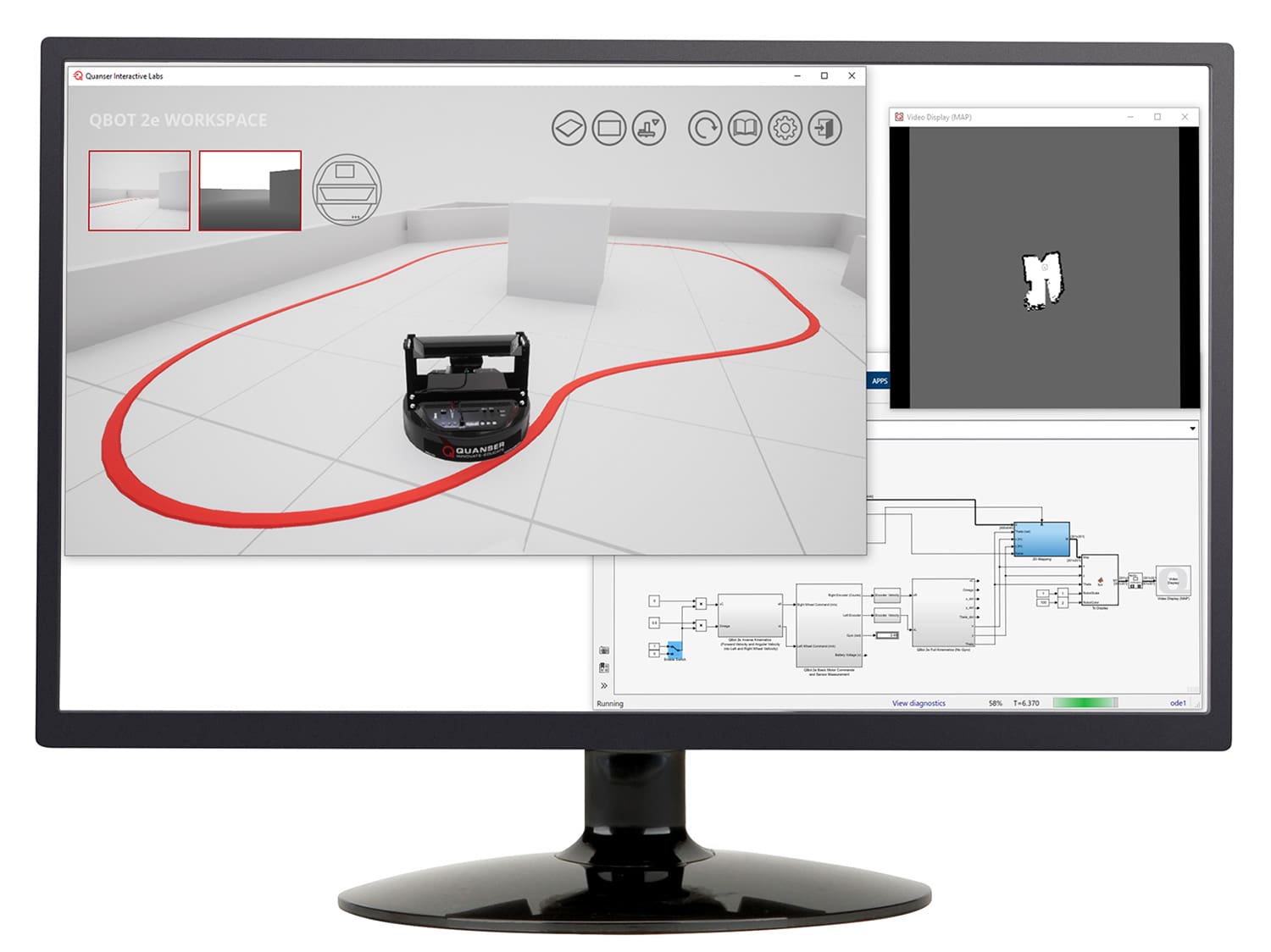
- 2D mapping and occupancy grid map
- Image acquisition, processing and reasoning
- High-level control architecture of mobile robots
- Vision-guided vehicle control
QBot 3 Bundle Components
- QBot 3 ground robot
- QUARC Autonomous License
- Wireless router
Related Products
QLabs Virtual QBot 2e
This product is no longer available.
Autonomous Vehicles Research Studio
Jump-start Your Autonomous Vehicles Research

QDrone
This product is no longer available.
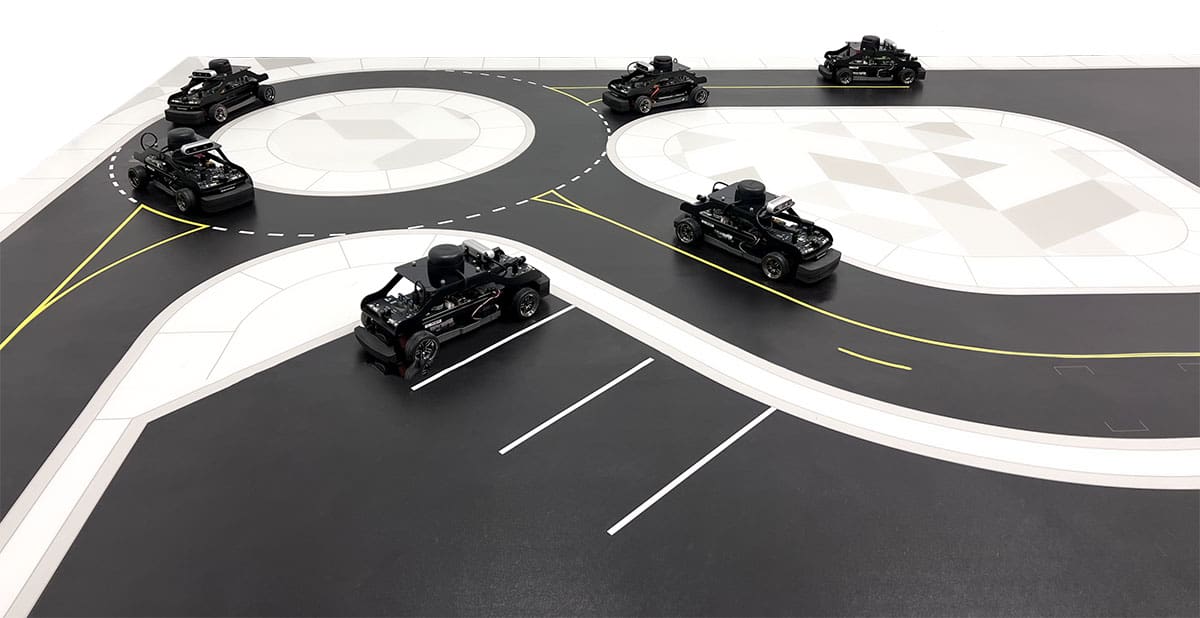
Self-Driving Car Studio
A multi-disciplinary turnkey laboratory that can accelerate research, diversify teaching, and engage students from recruitment to graduation.
